

上回[[DIY人形機器人] 日本Kondo公司機器人<零組件分享KHR-3HV Ver.2>],我們完成了災損KONDO開箱,清點所有零件,這次我們要正式開始組裝,重建之路始動!
| 作者/攝影 | 高稚然 |
| 時間 | 備嘗艱辛的一年 |
| 成本 |
|
| 難度 | * * * * |
| 材料表 |
|
有關詳細的硬體規格、型號及官網說明,請參考上篇:KONDO機器人KHR-3HV Ver.2開箱文([DIY人形機器人] 日本Kondo公司機器人<零組件分享KHR-3HV Ver.2>)。
上回我們辛苦地把零件清點完了(抹汗),但可別興沖沖地直接開始組,必須先確認零件功能一切正常並且校正才行,若貪快待組裝完畢才察覺問題,可是偷雞不成蝕把米呢。
KHR-3HV Ver.2的馬達是KONDO自家開發的串接模式,可以大幅減少接線的凌亂程度,但必須設定彼此間的串接關係。除了以專用軟體設定ID外,每顆馬達上都還有張貼紙標示區別。下圖1為17軸機器人各馬達的位置及ID編號:

圖1(圖片取自17軸的組裝說明書)
這裡使用光碟內附的:ICS3.5 Serial Manager來檢測、校正、修改馬達狀態。依說明書指示組裝線路、開啟軟體並連線如下:

圖2
使用下拉式選單或直接按「取得」連上對應的ID,之後便可使用「動作」欄的拖曳桿操控馬達位置,數值範圍3500-11500,對應-135度到135度,結束前務必將馬達歸零(數值7500)。如果想改變馬達組裝部位,需使用該軟體更動編號並寫入(書込),但請於硬體標示清楚避免搞混。ICS3.5 Serial Manager尚可讀取馬達的溫度、電流值,並且調整保護閾值。
經過檢測後,有幾顆馬達宣告陣亡,面對眼前1點多套KHR-3HV Ver.2的我,一時鬼迷心竅,決定直接挑戰KONDO機器人最豪華的22軸版本!(關於KHR-3HV Ver.2各種擴充套件的說明,可以參考[KONDO KHR3-HV Ver. 2 硬體配備])
增加一個腰或頭的可動度、兩個胯的自由度,一隻手再加一個可動度,可以扭腰、轉腳、護住中線,聽起來多麼的吸引人啊!立刻比對了17軸的組裝說明書以及擴充5軸的組裝說明書,發現除了馬達數量、螺絲多了幾顆、接線長度改變外並無差異,完全沒有問題!帶著KODON的線材到光華尋找近似的規格,除了沒有現成的3 pin排線以及防呆杜邦頭外其餘都找著了。圖3為採買的耗材種類,由左上瞬時針依序為:螺絲膠、杜邦母頭、3pin杜邦座、JP24150端子座、JP24150端子,另外還有五彩繽紛的排線。

圖3
那麼就開始夾線囉!目前為止看似一切順利──才怪,1.5 mm的端子加上纖細的排線,用端子鉗DIY的良率不到五成啊,更別提實際組裝時又拉斷好幾條。圖4就是鐵錚錚地失敗紀錄,奉勸大家若想組裝擴充套件,還是找專人製作好的線材才是。

圖4
但在此時我並沒有預料到之後可能會有的慘烈,也忘了先檢查測試控制版,就這麼一股腦地往前衝了。
硬體的組裝並不難,但要注意的是由於22軸為擴充套件,KONDO預設使用者先組好了17軸機器人,所以它最開始的步驟──是拆解。為了避免裝裝拆拆作虛功,先將擴充5軸說明書掃過一遍,記下要改裝的位置,以便在兩份說明書切換。在組裝上半身、腰時看22軸的說明書,其他部分則以17軸為主,組到最後要接線整線時在跳回22軸。歷時近一年(其間我報名了兩次研究所,落榜了兩次),終於完成所有的組裝過程了,真是備嘗艱辛啊!如果大家想早點完機器人的話,建議還是先組17軸基礎版就好,後續Debug的問題也會比較少。
鎖螺絲、上伺服臂相對簡單,麻煩的是接線,務必仔細、再三確認正確與否,而自製的接線五彩繽紛且乏於防呆,更增加了挑戰性。套件中附有貼紙,以顏色及號碼區別接在控制版上的各條接線。成品如圖5。
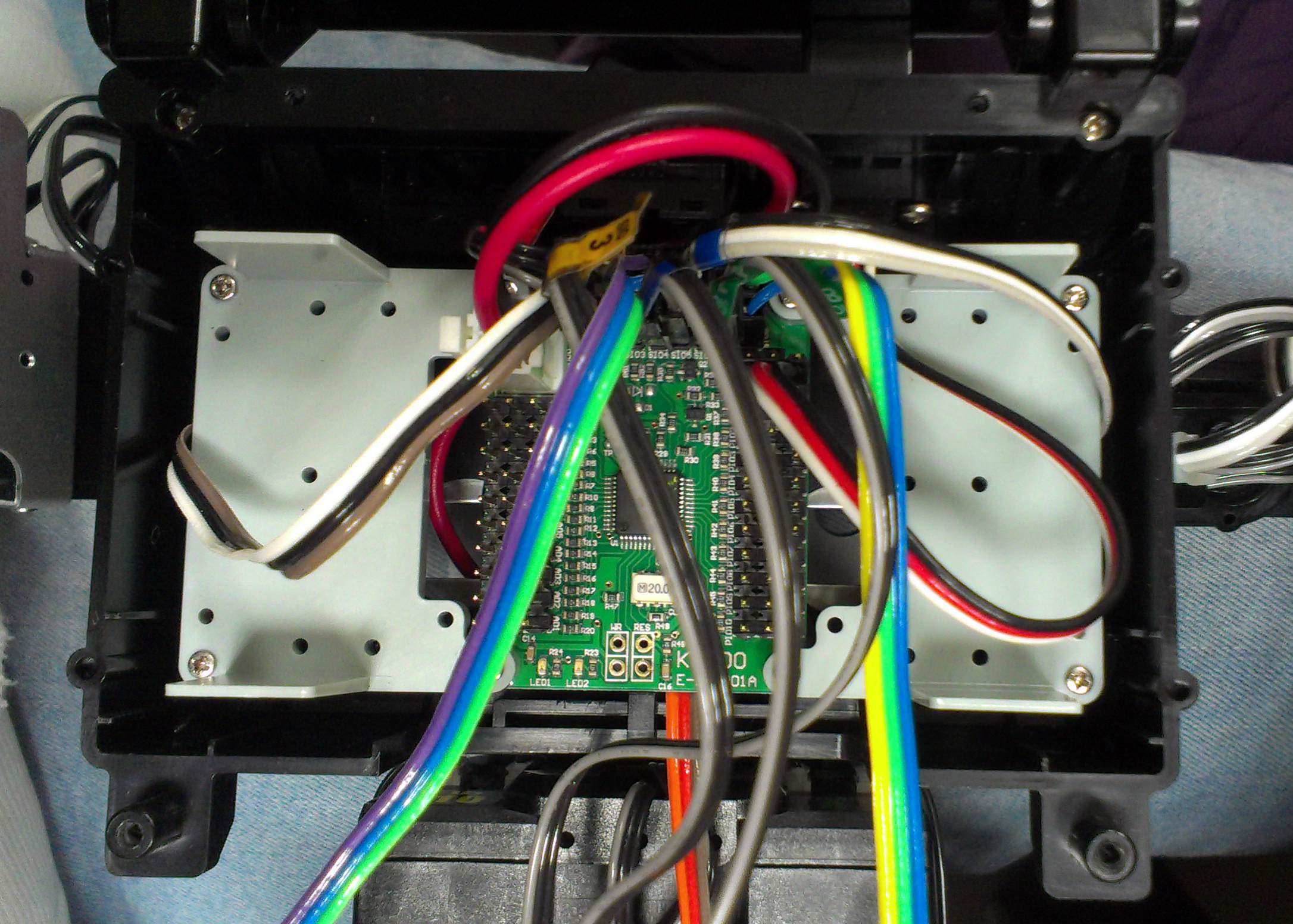
圖5
KONDO也提供了整線的設計,利用塑膠塊及束線帶,將接線們整理地服服貼貼,相當地細膩,附上左腳及後腰的整線成果。
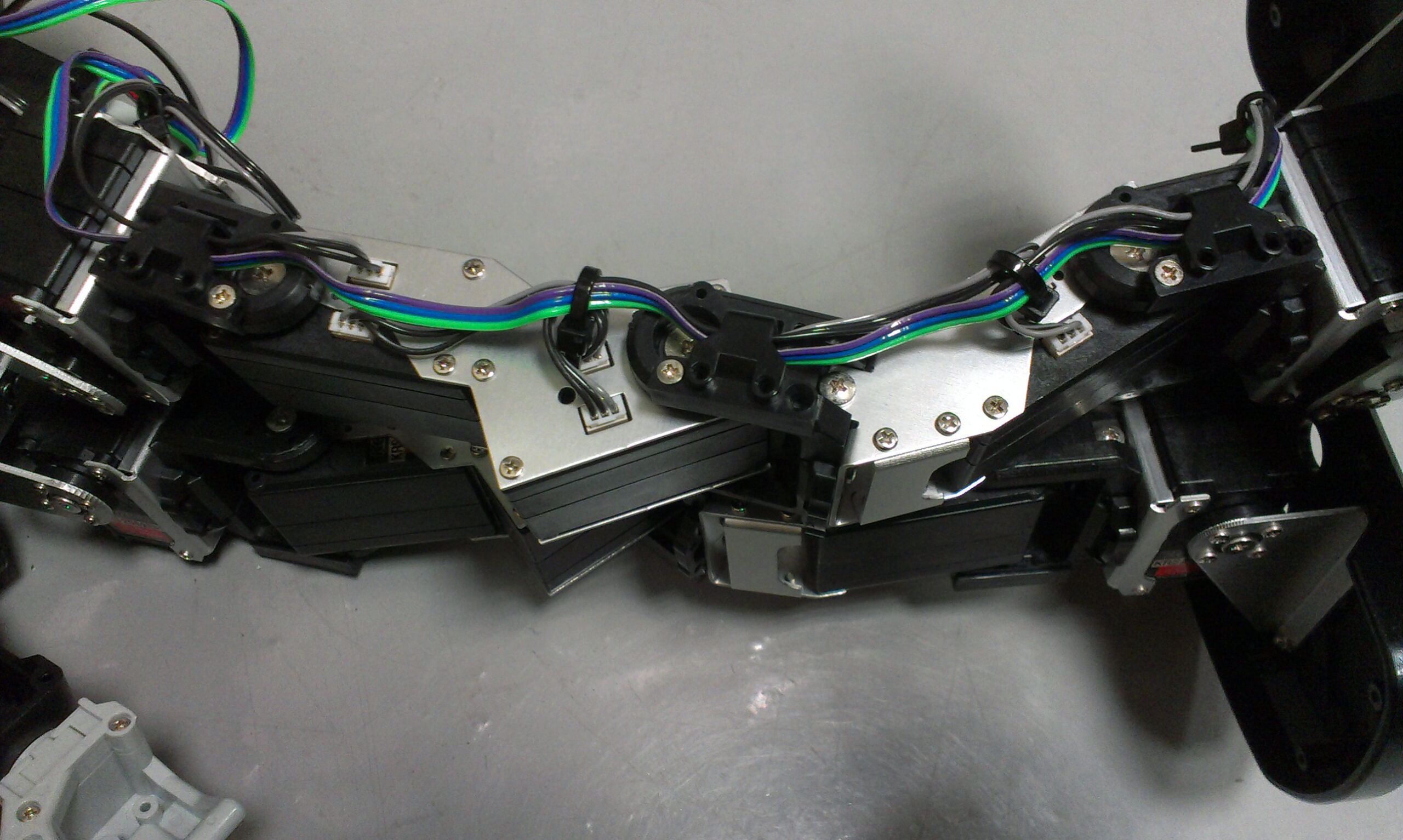
圖6

圖7
最後附上完成照,結束今天的文章,感謝一路讀到這邊的你/妳!

圖8
下回預告:慘烈慘烈再慘烈◢▆▅▄▃-崩╰(〒皿〒)╯潰-▃▄▅▆◣,除錯與通訊篇。
相關文章:



