前言
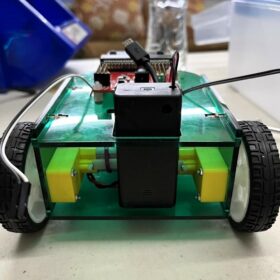
由於某所學校的客製化委託案,我們製作了 micro:bit V2 開發板搭配馬達驅動模組L298N和超音波感測器相結合,這一篇文章寫著如何組裝教學,想在課堂中使用 micro:bit 小車進行教學嗎?歡迎來電或來信洽詢~
⚡ 連絡電話:(02) 2306-2900
⚡️ 電子郵件:service@robotkingdom.com.tw
後續會有另一篇文章來說明如何使用 MakeCode 圖形化介面來編寫這台小車的程式!
也歡迎參考英文版!
- RK-micro:bit robot – assembly tutorial
- RK-micro:bit robot – line-following programming tutorial(MakeCode)
| 撰寫/攝影 | 楊國立撰寫 / 何卓鈞 翻譯,CAVEDU 2023 實習生 | ||
| 時間 | 1~ 2 hours | 材料表 | |
| 難度 | 3 / 5 | ||
本文
在開始之前,先來看看這台小車的材料表:
| —Micro:bit單板電腦 * 1 —L298n馬達驅動模組 * 1 —TT馬達 * 2 —超音波感測器(HC-SR04) * 1 —球狀輪 * 1 —65×15 mm 輪(與胎皮) * 2 (連接TT馬達) —9V 有開關電池盒 * 1 —Micro:bit感測器擴展板模組 * 1 —Micro USB 傳輸線 *1 —M3*8 螺絲 * 2 |
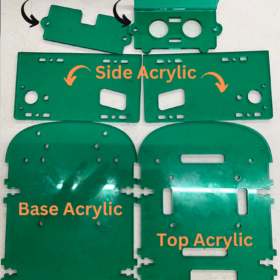
—M3*12 螺絲 * 10 —M3 螺母 * 12 —M2*20 螺絲 * 4 —M2 螺母 * 4 —M3*6 塑膠間隔柱 * 10 —M3*6 塑膠螺絲 *10 —M3 塑膠螺母 * 10 —壓克力板 * 1套 —10條10p 線材 |

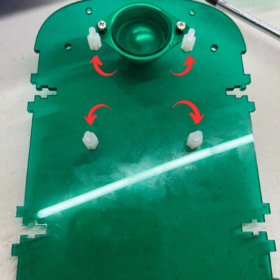
STEP 1 將前輪安裝到底板上(底板 x1,M3*8 螺絲 x2,M3 螺母 x2)(不分正反面,不擔心鎖錯面)。
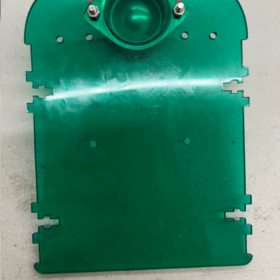
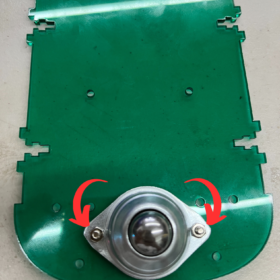
STEP 2 四個(M36) 螺絲安裝到底板上(同樣是 4個M36 螺絲 )。注意:請確保它安裝在正確的方向上,螺絲的一面與球形輪子在同一側。

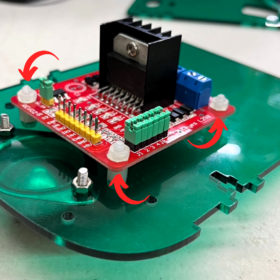
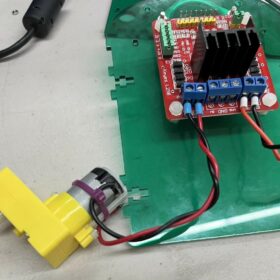
STEP 3 將 L298N 馬達驅動模組安裝在底板上方(注意馬達驅動模組的方向)。
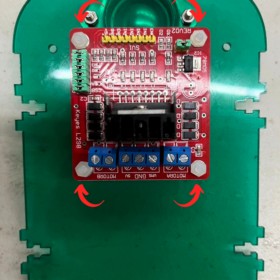
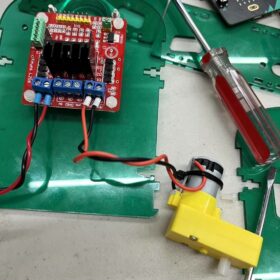
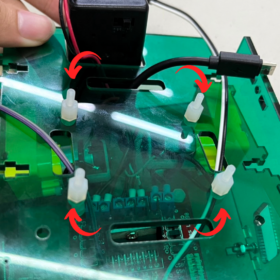
STEP 4 將兩個馬達的電線、帶有開關的 9V 電池盒和 Micro USB 線連接起來:
- 馬達 B {左側}:最左邊是黑色電線,然後右邊是紅色電線。
- 馬達 A {右側}:最右邊是黑色電線,然後左邊是紅色電線。
- 將 USB 的紅色電線放在最左邊的中間位置。
- 將電池的紅色電線放在最右邊的中間位置。
- 將所有電線的黑色電線一起放在中間。
- 請確保按照上述指示接好所有電線。
STEP 5 將馬達安裝在側邊的壓克力板上(請注意圖片中的方向)。
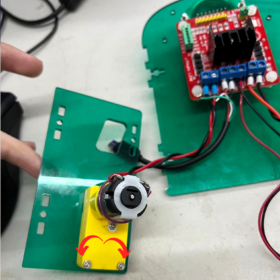
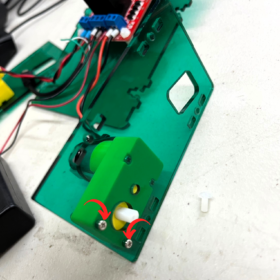
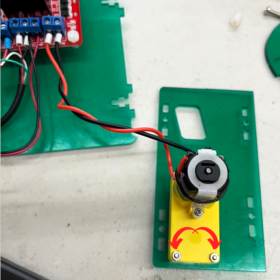
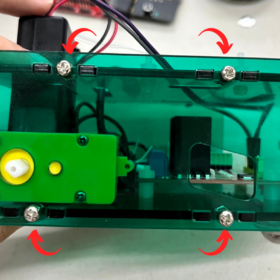
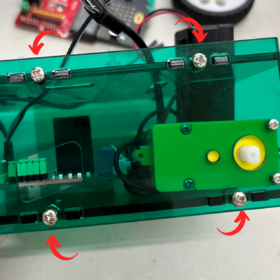
STEP 6 將側面壓克力板接到底部壓克力板(注意:螺絲不要鎖太緊)。
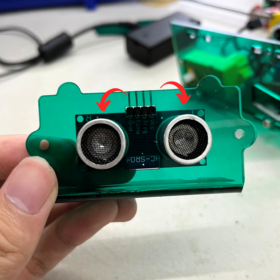
STEP 7 將超音波感測器安裝在壓克力板上,這裡會用到兩個 M3*6 螺絲
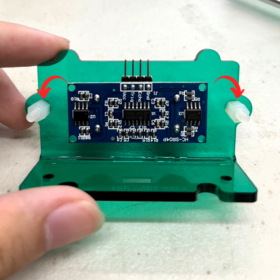
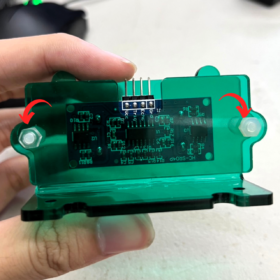
STEP 8 將超音波感測器專用的壓克力板安裝到底部壓克力板,這裡會用到兩個 M3*12 螺絲。請注意:這片板子要裝在底部壓克力板的上方,而不是下方!

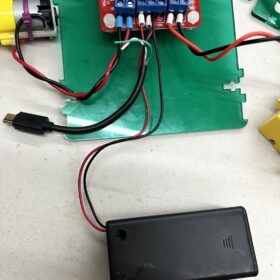
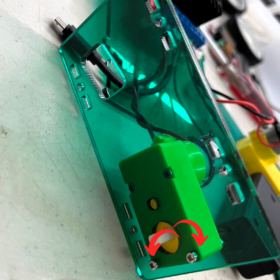
STEP 10 把 9V 電池盒放在頂部的壓克力板之間(請先打開電池盒,使其能夠放進去)


STEP 11 將 Micro USB 傳輸線小心繞出壓克力板的洞。

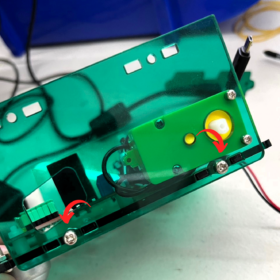
STEP 12 把所有電線接好,別接錯囉

STEP 13 將電線繞出壓克力板的洞,如下圖。

STEP 14 使用四個 M3*6 螺絲將頂部板固定好,如下圖。
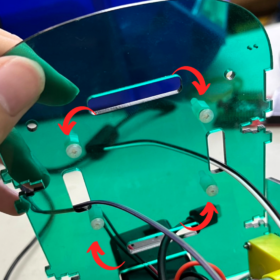
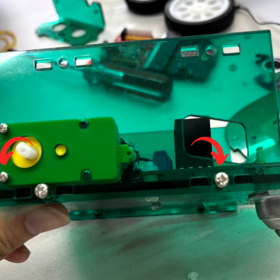
STEP 15 將頂部壓克力板與其他元件都接好,這時可以鎖緊所有螺絲。
STEP 16 將Micro:bit感測器擴充板模組安裝在頂部壓克力板上方(注意擴充板的方向)。

STEP 17 兩個輪子分別裝上 TT 馬達的轉軸。

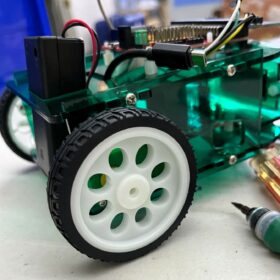
完成!
小車組裝完成,歡迎多多發揮 maker 精神,調整各種設定與元件配置,讓機器人更符合您的需求。後續會介紹如何使用 MakeCode 圖形化介面來編寫小車程式喔!