


本篇內容是由 CAVEDU 的實習生-黃筱晏提供的使用心得
介紹用二足步行機器人入門這本書做出的機器人
這裡是我們團隊買書的地方:機器人王國商城

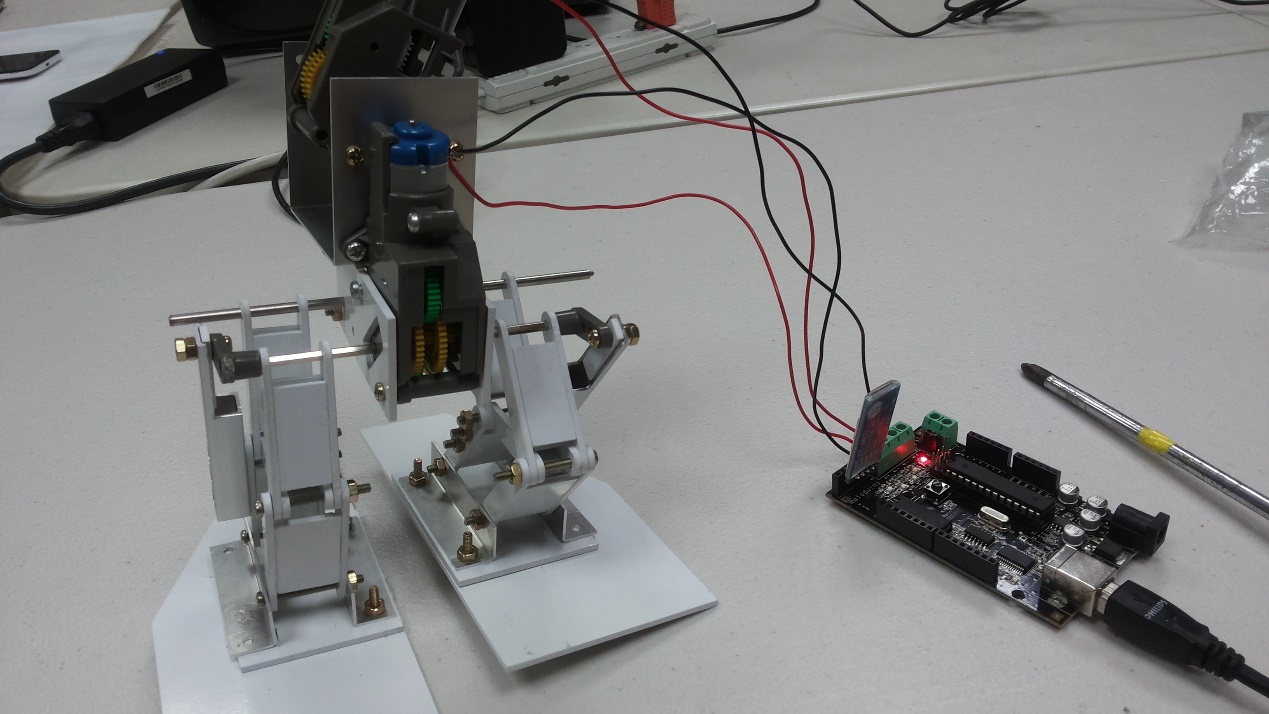
依照書中作法做出的樣子如下
馬達一顆控制頭部用來改變重心,另一顆為前進後退
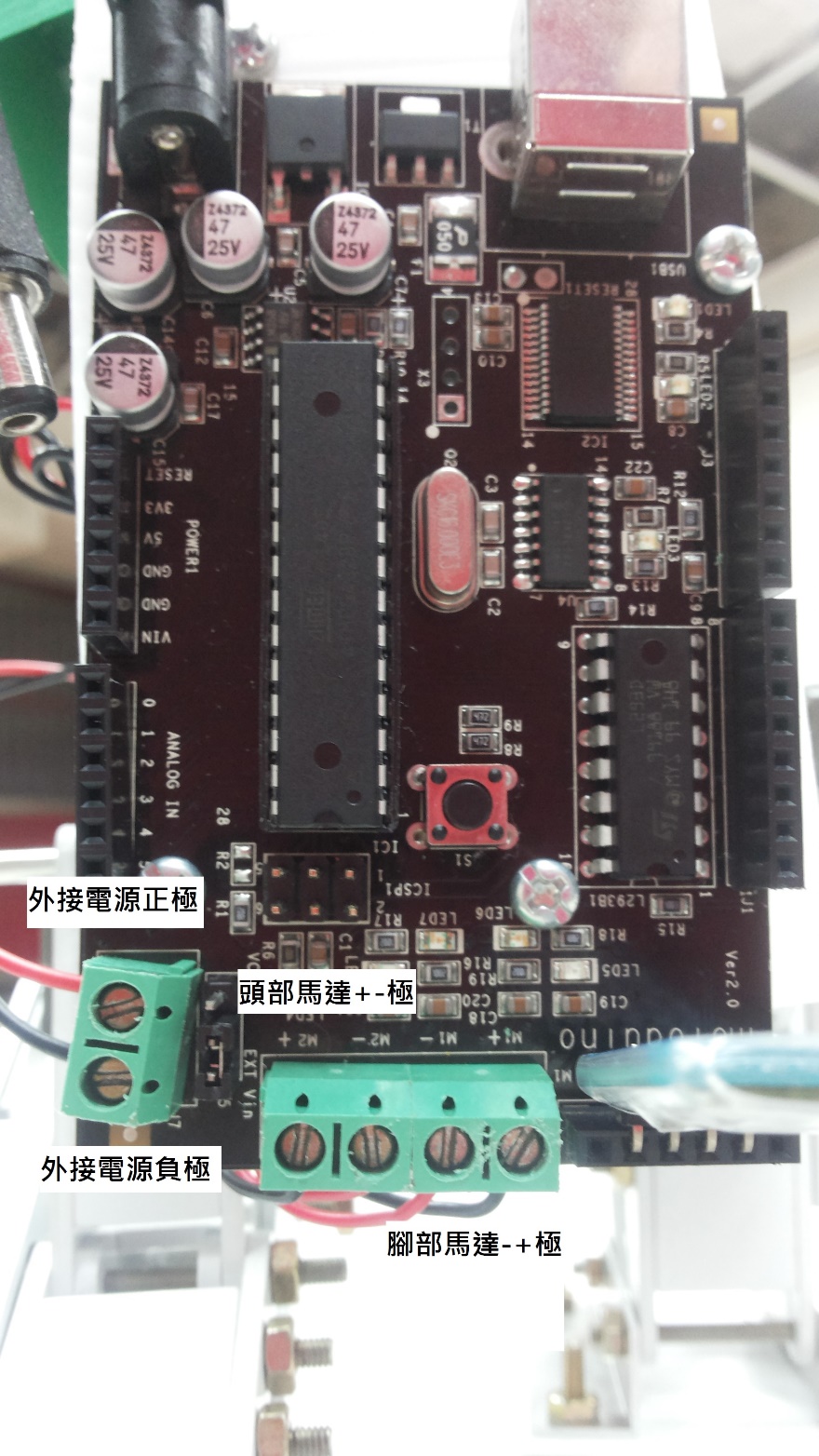
單一顆9V無法供應motoduino+馬達,所以要用外接電源
→把板子上的J5 移到Ext. Vin 的地方

電源馬達連接:
藍芽接法:
藍芽設定可以參造Cooper Maa
http://coopermaa2nd.blogspot.tw/2012/06/hc-0x-bluetooth-module.html

將motoduino及兩顆9v電池固定後:

改用motoduino控制馬達及藍芽,軟體方面使用app inventer2
Arduino程式:
[pastacode lang=”c” message=”” highlight=”” provider=”manual”]const int Motor_E2 = 5; // digital pin 5 of Arduino (PWM)
const int Motor_E1 = 6; // digital pin 6 of Arduino (PWM)
const int Motor_M2 = 7; // digital pin 7 of Arduino
const int Motor_M1 = 8; // digital pin 8 of Arduino
char val; //variable to receive data from the serial port(bluetooth)
void setup()
{
// initialize serial communications at 57600 bps:
Serial.begin(57600);
pinMode(Motor_M1, OUTPUT);
pinMode(Motor_M2, OUTPUT);
Serial.println("Start here");
}
void loop()
{
if(Serial.available())
{
val = Serial.read();
switch(val)
{
case 'f': // car forward
forward(0, 255);
break;
case 'b': // car backward
backward(0, 255);
break;
case 'l': // car turn left
left(0, 255);
break;
case 'r': // car turn right
right(0, 255);
break;
case 's': // car stop
motorstop(0, 0);
break;
}
}
}
void motorstop(byte flag, byte motorspeed)
{
Serial.println("Stop!");
digitalWrite( Motor_E1, motorspeed);
digitalWrite( Motor_E2, motorspeed);
}
void forward(byte flag, byte motorspeed)
{
Serial.println("Forward!");
digitalWrite( Motor_M1, HIGH);
digitalWrite( Motor_M2, HIGH);
analogWrite( Motor_E1, motorspeed);
analogWrite( Motor_E2, 0);
}
void backward(byte flag, byte motorspeed)
{
Serial.println("Backward!");
digitalWrite( Motor_M1, LOW);
digitalWrite( Motor_M2, LOW);
analogWrite( Motor_E1, motorspeed);
analogWrite( Motor_E2, 0);
}
void right(byte flag, byte motorspeed)
{
Serial.println("Head Turn Right! ");
digitalWrite( Motor_M1, HIGH);
digitalWrite( Motor_M2, HIGH);
analogWrite( Motor_E1, 0);
analogWrite( Motor_E2, motorspeed);
}
void left(byte flag, byte motorspeed)
{
Serial.println(" Head Turn Left!");
digitalWrite( Motor_M1, LOW);
digitalWrite( Motor_M2, LOW);
analogWrite( Motor_E1, 0);
analogWrite( Motor_E2, motorspeed);
}app inventer2程式:
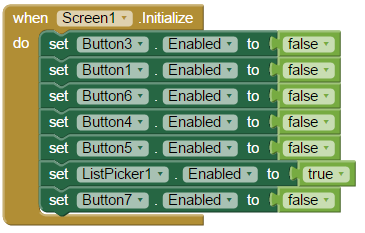
在程式初始化時,設定各元件可否點選
在 ListPicker 點選之前設定藍牙的配對裝置位址與名稱

當 ListPicker 被點選之後,對藍芽發起連線,若成功則設定各元件能不能點選。

當按下按鈕後,Android 手機會經由藍牙發送一個字元給Arduino

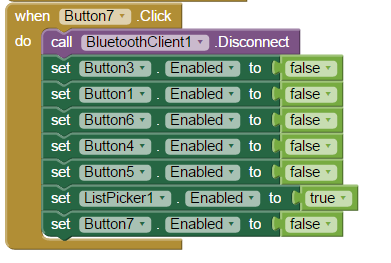
按下Button7時,斷開藍牙連線,各元件恢復成連線前的樣子。
在手機上顯示:

Finish:
零件提供來源在這裡



