


先前曾經介紹以MindSensors的感測器LineLeader-v2、SumoEyes所做出的循跡避障機器人。今天要為大家介紹一個也是Mindsensor所推出的好物 NXT-Cam-v4,並使用它來作出可辨視物件顏色的機器人。在EV3主機下方的那個看起來像單眼相機鏡頭的裝置就是 NXT-Cam-v4

先來介紹 NXT-Cam,您可以把它想成是一台小型追蹤器,藉由擷取到的物件顏色來進行辨別並追蹤,最多可追蹤八個不同顏色的物件,要使用NXT-Cam之前,必須先進行以下步驟:
1.請先更新NXT-Cam的Firmware至3.8D版本:請點我前往下載(若使用NXT主機則省略此步驟,本篇使用EV3主機)
(有關感測器韌體更新可參考之前文章教學)
2.請至MindSensors官網下載NXT-Cam驅動程式:請點我前往下載(請選擇v4版本下載,下載後解壓縮)
3.請下載NXT-CamVIEW:請點我前往下載(請點擊最新版本下載,下載完直接點擊安裝)
要使用NXT-Cam進行物件追蹤,首先必須先建立Colormap,而Colormap就是上述的物件顏色,再將Colormap存到NXT-Cam的記憶體,因此我們需要使用剛才所下載的NXT-CamVIEW,請開啟它並將NXT-Cam以EV3的USB資料傳輸線接上電腦,並按下“Connect”,作用是與NXT-Cam連結,如下圖:

接著請將NXT-Cam的鏡頭對準某單一顏色的物體(選擇單一顏色會簡單許多)再按下旁邊的“Capture”,會出現抓取物件的影像,如下圖:
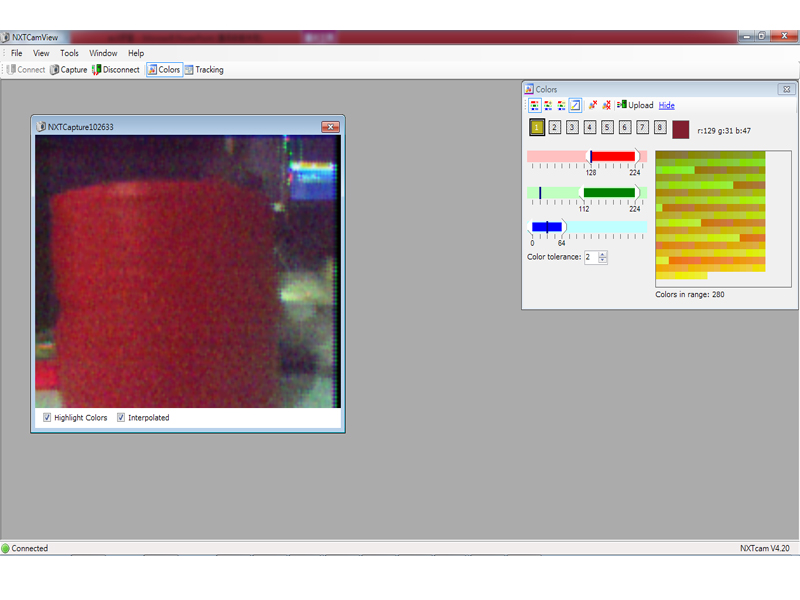
您會看到右方出現Colormap的視窗,目前是將物件顏色存在第1個欄位,共有八個欄位可儲存,接著在左邊的影像中點選該物件的顏色,會出現許多黃色的小點,這些小點便是NXT-Cam要追蹤的範圍,在此您可以調整右方三種顏色的色帶值,盡量讓黃色小點覆蓋整個物件表面,讓會讓後續的追蹤較容易。接著請點選右邊視窗上的”Upload”,將Colormap存到NXT-Cam的記憶體,點選左上角選單中的”Tracking”,按下”Start”便開始追蹤物件,如下圖所示,紅色區塊即為剛才所存的Colormap,將物件從NXT-Cam的鏡頭前移動,紅色區塊也會跟著移動,OK!追蹤成功。

按下”Stop”和左上角選單中的”Disconnect”,將USB線拔除,現在該物件的顏色已儲存在NXT-Cam的記憶體中,可以使用它來撰寫程式,讓我們的EV3機器人追蹤物件了!以下影片是以黃色三角板為指定追蹤物件,在機器人偵測到物件後,便移動至物件面前停下,移動過程會修正路線讓物件保持在視線範圍:
本影片機器人程式可由此下載供參考使用
相關文章

