本篇教學整理自3D視覺專題製作:Kinect、Processing、Arduino及MakerBot一書,告訴您如何建立 openNI 這個 Kinect 函式庫,並在 Processing 環境中來進行開發。按照書中說明,本平台於Windows / MAC OSX 與 Linux 都可以架設,但我們只在 Windows 上操作,請依照下列步驟完成環境建置:(或參考OpenNI 的官方安裝說明)
1. 下載 SimpleOpenNI 的 Windows打包檔, https://code.google.com/p/simple-openni/,並選擇 Windows 32位元版本。下載後請解壓縮,其中有四個檔案,請依序安裝完成
a. 安裝 OpenNI 的安裝檔(例如 openni-win32-1.5.4.–dev.msi),一路安裝完成。
b. 安裝 NITE middleware 的安裝檔(例如 nite-win32-1.5.4.0-dev.msi),一路安裝完成。如果要求金鑰時,請輸入0KOIk2JeIBY
d.安裝 SensorKinect 驅動程式(例如 SensorKinect092-Bin-Win32-v5.1.2.1.msi),一路安裝完成。如果您是使用 Asus Xtion Pro也是用這個驅動程式即可。您應該會在 Windows 的裝置管理員中看到 Kinect 被辨識為Primesense 裝置的 Kinect4Windows Audio 與 Kinect4Windows Camera(下圖左)。如果是使用微軟官方的 Kinect SDK 則會被辨識為獨立的 Microsoft Kinect裝置(下圖右)。


注意!OpenNI 1.x 版無法與微軟官方的 Kinect SDK相容,請將其移除。但如果您想要使用 OpenNI 2.0版(大改版!)的話,則需要安裝 Kinect for Windows SDK,換言之您就無法在 MAC OSX 或 Linux 下來使用 OpenNI 2.0版了。
3. 安裝 OpenNI for Processing 函式庫。請下載 SimpleOpenNI 在 Google code 下載清單中的 SimpleOpenNI-0.27.zip,下載之後解壓縮,並將其中的 SimpleOpenNI 資料夾(內有 documentation、examples與 library三個資料夾)放到 Processing 的sketch location(預設位置是在<我的文件>/Processing/libraries)。如順利載入,則可在 Processing 的 Files/ Examples… 選單的最下方看到 SimpleOpenNi資料夾,這時您就可以自由來玩玩看各個範例了!

4. 您的第一隻Processing / Kinect 程式:
| import SimpleOpenNI.*; SimpleOpenNI kinect; void setup(){ void draw(){ image(kinect.depthImage(), 0, 0); |
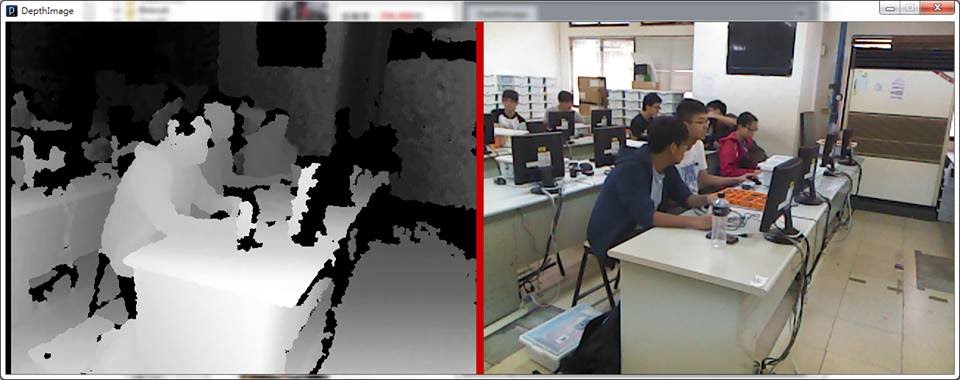
執行畫面:
左側為深度圖,右側為一般的圖檔,皆為動態顯示。