
這次分享的內容,是由Python開啟EV3的超音波偵測,為了確定有確實的開啟超音波感測器,
我們設定讓EV3的兩組馬達前進十秒鐘,在這10秒內,如果超音波偵測前方15公分內有障礙物,
則立即停止馬達的旋轉。

以python on EV3 機器人-使用python控制EV3馬達為基礎,改編的超音波感測器程式碼,改編內容如下

(1)在輸入ev3.lego的模組中,新增UltrasonicSensor的功能
(2)新增python內建的time模組
(3)宣告超音波模組接入的孔為 一號孔
(4)在while迴圈設定10秒後跳出
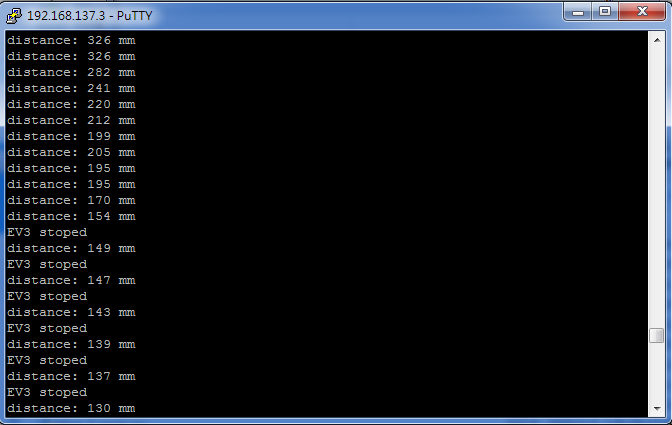
(5)印出超音波感測器量測的距離
(6)如果量測距離校於150mm馬達停止,大於的話馬達繼續前進
檔案撰寫完畢後,首先將撰寫好的檔案傳送至EV3之中,以下是使用Cyberduck的SFTP模式傳送檔案,使用者帳號為:root,密碼為r00tme,密碼的0是數字零


傳送完檔案後,使用putty連線到EV3並執行檔案,使用者帳號為:root,密碼為r00tme,密碼的0是數字零

執行結果如下:
有人或許會問,傳送檔案不能用putty傳送嗎?其實是可以的,不過小編在這推薦cyberduck另外做檔案傳輸,
因為使用putty傳送檔案需要指定檔案的名稱、傳送檔案和被傳送檔案的路徑才能完成。
相較之下,cyberduck只需要把想傳送的檔案拖曳到想放置的地方即可,十分方便。
喜歡都用指令控制的朋友也可以用puuty的SCP方法傳送檔案,或是直接在EV3的環境撰寫python檔案喔



