

今日有幸測試到在EV3上應用Mindsensors 的LineLeader感測器。
在測試之前,要先對感測器做點處理,使感測器與地面有固定距離,才能測得穩定數值。可以獲得穩定數值的有效離地距離為1~1.5個樂高積木高,所以本次測試在感測器的左右各加了一個平滑橫桿。

第一項測試為track line,也就是循跡模式,在本指令中,我們可以獲得line的輸出值,這個值稱做轉向值,數值範圍為-100(極左)~100(極右),您可以透過轉向值協助感測器中心維持在黑線的中央。如果您有一台循跡車,您可以將lineleader裝在該車中心線上,利用轉向值來決定您的左右兩顆馬達的馬力的數值。例如:您可以設右馬達馬力為左馬達馬力加上轉向值。在這樣的情況下,如果轉向值為0時,代表車子中心在黑線正中央,兩顆馬達馬力便可以相同。如果轉向值為正值,表示車子中心偏黑線右側,必須左轉,右邊馬力大於左邊馬力。如果轉向值為負值,表示車子中心偏黑線左側,必須右轉,左邊馬力大於右邊馬力。更進階的做法中,您也可以視情況在轉向值前乘上一個適當的係數,決定轉向值的重要性大小。

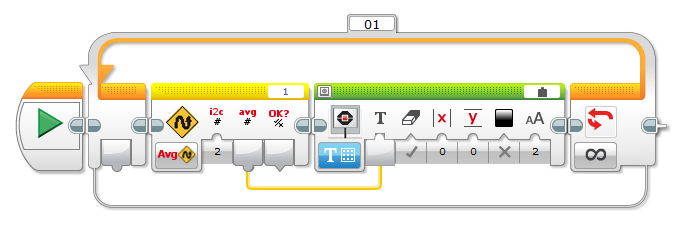
第二向測試為weighted average,加權平均值模式。在lineleader八顆光感中,偵測到黑即為1,白即為0,由左到右的加權為(10,20,30,40,50,60,70,80)。平均值為偵測到黑色的數值相加除以測到黑色光感數,有一例外為如果全部都測到黑色,則輸出0。Ex.如果由左到右光感值為(0,0,0,1,1,0,0,0),平均值為(0+0+0++40+50+0+0+0)/2=45,如果只有一條黑線的情況下,利用weighted average便可以清楚的判斷lineleader sensor中心與黑線中心的相對位置。此外,黑線的寬度會影響到測到黑色的光感數量。
以上兩種模式在做循跡車時都十分的方便,不過要注意當黑線不見時的斷線情況(全白),或兩條黑線交叉的十字路口情況(全黑),記得加上switch做不同狀況的處理唷!

