課程介紹
本課程提供一條連貫且高效的學習路徑,協助學員從 OpenUSD(Universal Scene Description)的基礎概念,銜接到 NVIDIA Isaac Sim 平台中進行機器人模擬與開發應用。
透過實際操作,學員將能夠建立與模擬機器人資產,學習如何整合 ROS2 與感測器資料,並應用 Software-in-the-Loop (SIL) 進行測試與驗證。本課程不僅聚焦於如何操作工具,更強調將 USD 資產設計與機器人模擬結合,協助學員培養從數位孿生到智慧機器人開發的完整技能,並成功通過 NVIDIA DLI 原廠課程認證。
本課程使用 NVIDIA DLI OpenUSD / Robotics / Digital Twins for Physical AI 等自主學習課程,NVIDIA DLI 目前未提供正體中文版本,相關資訊皆以原廠為準。
部分課程完成課程評量之後即可取得完課證明。
課程定位
- 程度:技術 – 中級
- 主題:Omniverse / 數位孿生 / OpenUSD
- 完課證明:有
- 課程先修條件:熟悉 Python 語法,對機器人基本概念有興趣,或預期導入相關技術者
- 所需軟體:Isaac Sim
- 所需硬體:可執行 Isaac Sim 的桌上型或筆記型電腦。根據 NVIDIA 原廠說明,至少需 3070 等級 (8GB VRAM) 顯示卡,系統記憶體 32GB,儲存空間 500 GB 以上規格電腦。
- 相關資訊:請參考 NVIDIA DLI 學習路徑之 OpenUSD、Digital Twins for Physical AI 與 Robotics 分類,歡迎從中找到更多您喜歡的課程
課程特色
- 完整學習路徑:從 OpenUSD 的基礎概念到 Isaac Sim 的機器人模擬,涵蓋數位孿生與機器人開發的完整流程。
- 動手實作為核心:課程以實際操作為主,學員可在 Omniverse 與 Isaac Sim 環境中建立、匯入與測試資產,加深對理論與實務的連結。
- 學習功能整合:結合 OpenUSD 的資產管理與 ROS 2 的控制介面,讓學員體驗從 3D 建模、感測器整合到模擬測試的完整流程。
- 取得原廠認證:課程對應 NVIDIA DLI 正式課程,完成課程評量後可獲得數位學習證明。
- 前瞻應用導向:掌握數位孿生與 AI 機器人模擬的最新技術,為智慧城市、智慧製造及研究應用奠定基礎。
學習目標
本課表選錄 NVIDIA DLI 學習路徑之 OpenUSD、Digital Twins for Physical AI 與 Robotics 分類
- Learn OpenUSD: Learning About Stages, Prims, and Attributes
- Learn OpenUSD: Setting Up Basic Animations
- Learn OpenUSD: Asset Structure Principles and Content Aggregation
- Learn OpenUSD: Developing Data Exchange Pipelines
- Getting Started: Simulating Your First Robot in Isaac Sim
- Ingesting Robot Assets and Simulating Your Robot in Isaac Sim
- Developing Robots With Software-in-the-Loop (SIL) In Isaac Sim
培訓藍圖與路徑
OpenUSD
- 了解 stage、prim 和屬性
- 設定基本動畫
- 資產結構原理與內容聚合
- 開發資料交換管道
Isaac Sim
- 模擬第一個機器人
- 擷取機器人資產並模擬機器人
- 使用Software-in-the-Loop (SIL)開發機器人
課表
第一天 OpenUSD 基礎操作
| 時間 | 內容 |
| 10:00 – 10:30 | 簡介NVIDIA DLI深度學習機構與主流AI工具
註冊NVIDIA開發者帳號 |
| 10:30 – 12:00 | OpenUSD 基本觀念與實作
– 建立和操作 USD 檔案 – 定義基本類型,建立場景階層 – 管理屬性和中繼資料。 – 驗證 prim 的存在 |
| 12:00 – 13:00 | 午餐時間 |
| 13:00 – 14:40 | 設定基本動畫
– 使用 TimeCode 和 timeSample 等 OpenUSD 概念為 prim 屬性製作動畫。 |
| 14:40 – 15:00 | 休息與交流時間 |
| 15:00 – 16:50 | 資產結構原理與內容工具
– 建立和管理資產入口點和介面。 – 組織原始層次結構以提高清晰度和效率。 – 使用 OpenUSD 層堆疊和模型類型來設計和實作工作流。 |
| 16:50 – 17:00 | Q&A 與複習:
回顧本日學習內容並解答問題。 |
第二天 Isaac Sim 機器人模擬
| 時間 | 內容 |
| 10:00 – 11:00 | 開發資料交換管線
– 定義OpenUSD 資料交換相關的關鍵概念與挑戰。 – 使用 OpenUSD 實作幾何和材質的基本資料擷取技術。 |
| 11:00 – 12:00 | – 使用資產驗證技術評估 OpenUSD 資產的品質和有效性。
– 開發功能性資料交換管道 |
| 12:00 – 13:00 | 午餐時間 |
| 13:00 – 14:20 | 在 Isaac Sim 中模擬第一個機器人
– 使用 ROS2 和 OmniGraph 設計控制機制 – 整合 RGB 和 2D 雷達等感測器 – 把感測器資料從 Isaac Sim 傳輸到 ROS2 – 在 RViz 中進行即時視覺化和分析 |
| 14:20 – 14:30 | 休息與交流時間 |
| 14:30 – 15:50 | 在 Isaac Sim 中擷取機器人資產並模擬機器人
– 使用 URDF(統一機器人描述格式)匯入機器人資產 – 設定控制介面-差動控制器和鍵盤控制 |
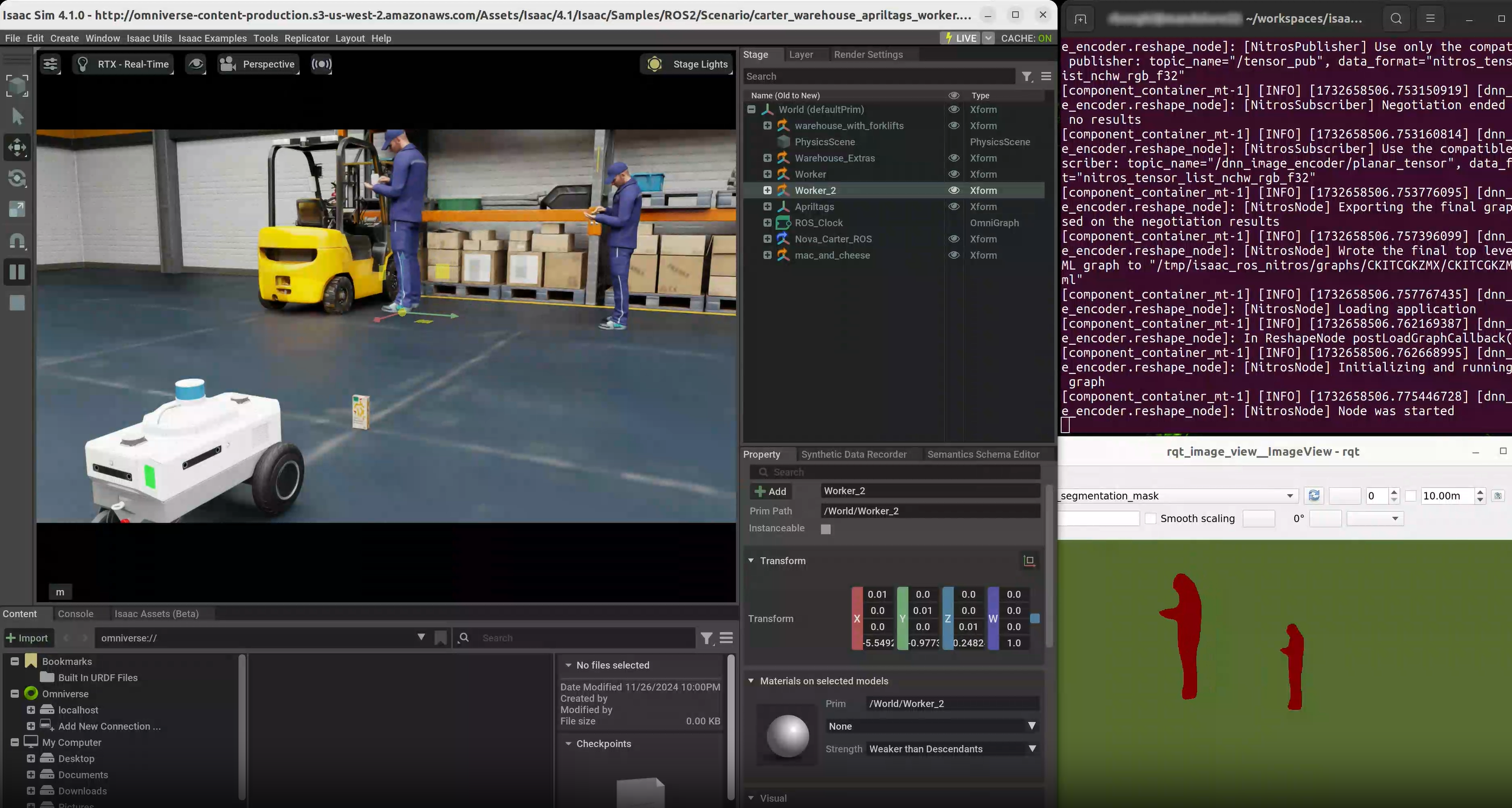
| 15:50 – 16:50 | 在 Isaac Sim 中運用 Software-in-the-Loop (SIL) 技術開發機器人
– SIL基礎概念與優勢 – 與 ROS 2 套件整合進行模擬測試 – 使用 OmniGraph 進行視覺化coding並於模擬環境中測試圖像分割 |
| 16:50 – 17:00 | 結語
填寫課程問卷,了解衍伸學習與更多學習資源。 |