

Touch Sensor Block(觸控感測器指令)
觸控感測器指令可以讀取觸控感測器的感測值。可以藉由偵測觸控感測器的狀態:壓下(Pressed)、釋放(Released)、彈起(Bumped,壓下後釋放)來做邏輯輸出(真假,true or false)
1. 選擇觸碰感測器的port

用來選擇你的觸碰感測器是連接於EV3主機的哪一個接孔(port,1、2、3或4)上。
2. 模式選擇
a. 測量(輸出)模式(Measure-State)

在這個模式下,可以測得感測器的狀態,若壓下即為真,釋放即為假,可以透過邏輯來控制其他感應器的動作。
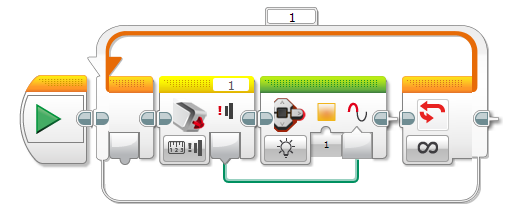
範例一:
如果觸碰感測器所偵測到的結果為真,EV3螢幕上便出現節奏性的橘色閃爍。
b. 比較(輸入)模式(Compare-State)

可以選擇你要測試哪一種模式: 壓下(Pressed)、釋放(Released)、彈起(Bumped)。再與後面比較真偽。
3. 輸入
輸入可以透過資料線(Data Wire)由數字(Numeric)來控制,範圍是0~2,0代表釋放(Released)、1代表壓下(Pressed)、2代表彈起(Bumped)。
4. 輸出
輸出有三種:
|
輸出 |
資料類型 |
備註 |
|
狀態 |
邏輯(Logic) |
於測量模式下使用,壓下為真,釋放為假。 |
|
比較結果 |
邏輯(Logic) |
是比較模式下所選擇的感測器狀態下產生的值。 |
|
測量值 |
數字(Numeric) |
比較模式下當下的感測器狀態: 0=釋放(Released) 1=壓下(Pressed) 2=彈起(Bumped) |
(參考資料 : EV3官方HELP)



