

今天小編要跟各位分享一個機器人改裝教學,它源自淡江大學電機系-CILAB實驗室的專題作品,
這項改裝作品在Tokyo Maker Fairer發表後,販賣這個機器人的公司也將這個發想概念運用在他們新的機器人產品上,
讓人覺得Maker與商品製造其實能很好的相輔相成。話不多說,我們來看看這個機器人影片吧。
看了這個影片,也想要自己動手改裝的話,請繼續往下看喔
- 本項作品使用日本TOMY公司生產的“BATTROBORG 4G”拳擊機器人玩具,
- 將原本的體感操控,改造成能利用Android裝置,透過藍芽來控制機器人的動作(體感下一篇敬請期待)。
一組機器人需要準備
- Arduino開發版*1
- 藍芽模組*1
- 3號*4電池盒*1
- 光耦合器元件PC817*2
電路測試
- 請先按照附圖之電路圖在麵包板上佈置電路
在此我們利用LED來測試我們在光電耦合器的使用上是否正確
。若是配置正確,在我們用手機向藍芽裝置傳送資訊時,對應的LED就會閃碩。

Arduino程式編輯
在此我們監聽接上藍芽模組後的TxRx,當藍芽接收到傳送的字元‘0’或‘1’時,分別啟動連接於Pin 10&11的光電耦合器,藉此讓連接於耦合器另一端的LED的正負極導通。
AppInventor撰寫App
- 1 介面初始化
- 我們在APP介面(圖1a)上配屬了三個按鈕(上方的左拳&右拳與右下方的藍芽裝置斷線),與一個用來列出並選取可連線的藍芽裝置的ListPicker(左下藍芽裝置連線)。因為本APP需要與藍牙裝至連線,所以要將BluetoothClient元件加入至介面中。在程式初始化後,因為還沒連上任何藍芽裝置的關係,這時除了BTConnect外的其他按鈕將呈現灰色無法選取的狀態(圖1b)。
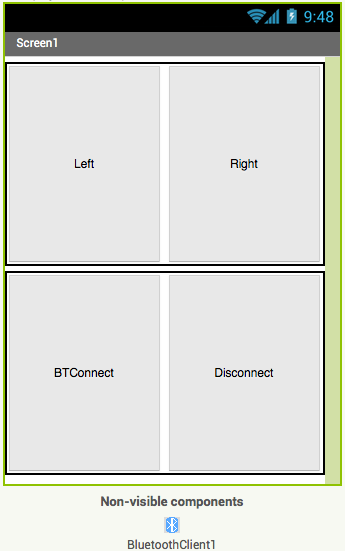
圖1a

圖1b
2 藍芽裝置連線
- 在我們開啟藍芽裝置選單前,要先將可供連線的裝置清單輸入至選單中(圖2a)。選取裝置並確定連線成功後,將原本設為不可選取的左拳、右拳以及裝置斷線按鈕開啟(圖2b)。

圖2a

圖2b
3 藍芽功能實作
- 當我們與裝置連線後,點擊左拳或右拳按鈕時,會透過藍芽對連線裝置送出字元的1與0資料(圖3a)。按下裝置斷線的按鈕時,則會與裝置斷開連結,並重新將需使用到藍芽功能的按鈕關閉(圖3b)。

圖3a
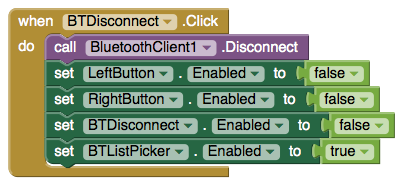
圖3b
實際測試
- 將撰寫完成的APP燒錄至手機,當我們與Arduino上的藍芽模組連結,並按下左拳與右拳按鈕時,與之對應的LED就會閃碩,代表我們光電耦合器的使用與設置是正確的。
機器人手把
- 手把與基板拆解
- 本作品使用的拳擊機器人玩具為日本TOMY公司生產的“BATTROBORG 4G”,同樣方法適用於同公司前代產品“BATTROBORG 20“。
將手把拆開後,可以看到控制器是利用搖晃時,撞針撞擊簧片,簧片互相接觸後導致線路導通,觸發一個揮拳的訊號,因此我們才在此作品上使用光耦合器來當作觸發開關(圖4)。
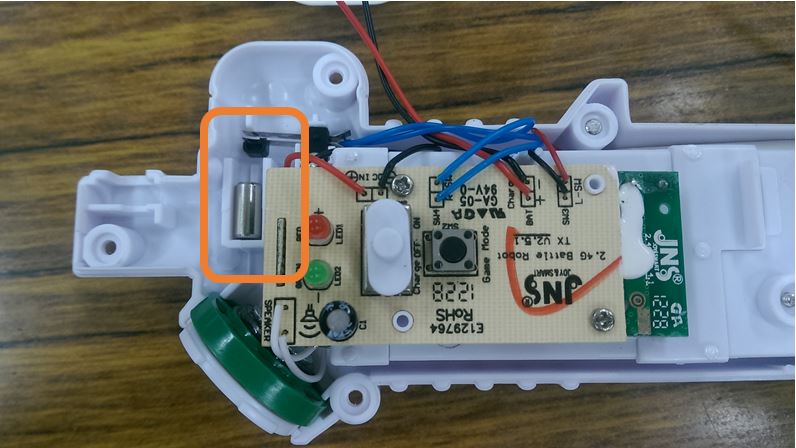
圖4,橘線標記處為撞針與簧片
將基板拆下,如下圖(圖5),可以看到三個部分分別為基板供電、右拳揮拳以及左拳揮拳,這些就是等下要跳線到麵包板上使用的接點。(在這裡可以選擇將原廠焊好的線留著繼續使用,或者自行換上單芯線)

圖5,橘線標記處分別為 a.基板供電 b.右拳揮拳 c.左拳揮拳
成品測試
- 按照下圖(圖6)指示將基板的左右揮拳腳位跳線至對應的光耦合器(因訊號觸發機制為腳位導通,故接線無正負之分),並將基板電源供電腳位分別接上+5V和接地,Arduino接電,及可讓基板與機器人連線,並讓手機透過藍芽操控拳擊機器人。
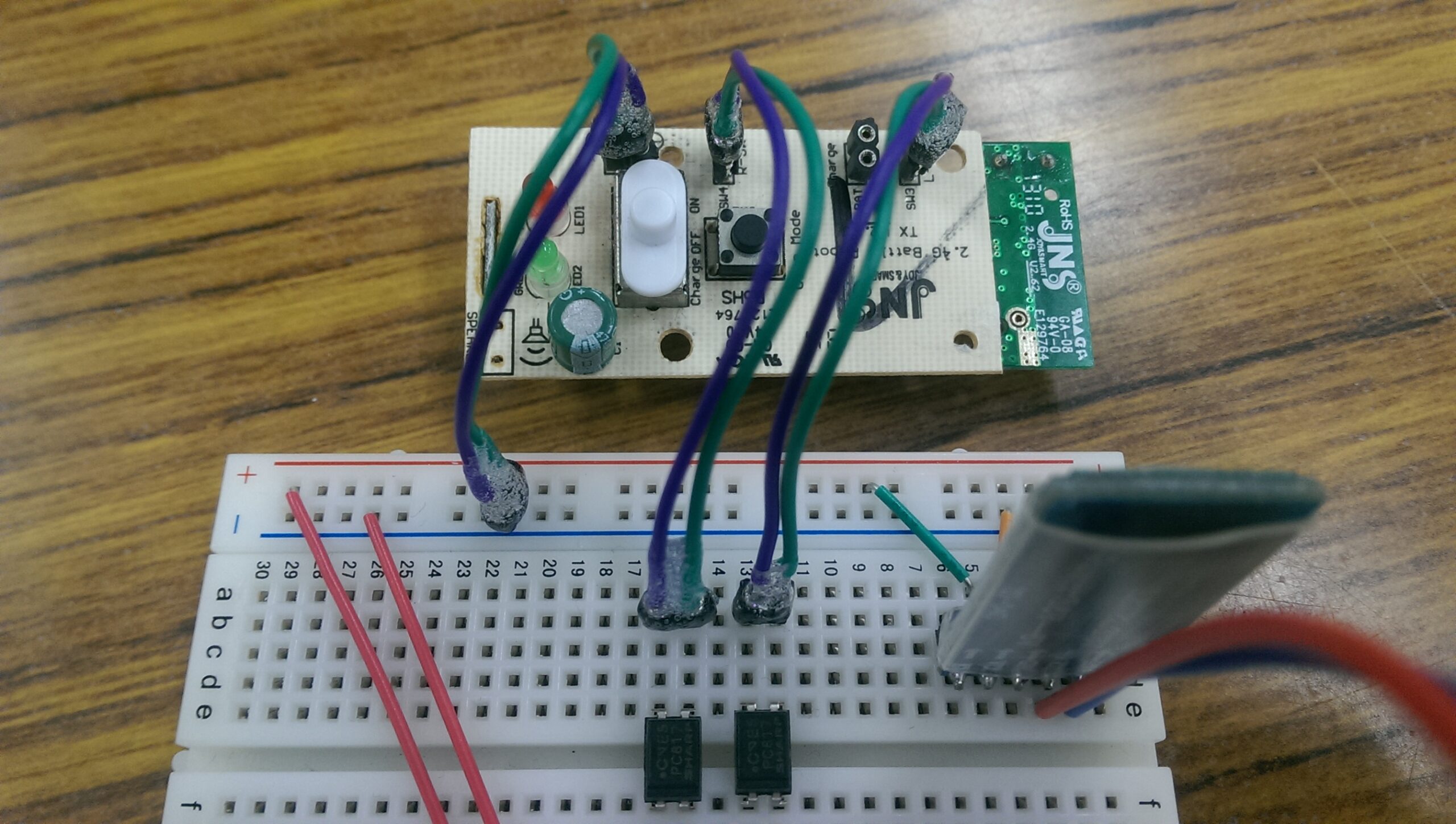
圖6
於Maker Faire Tokyo展示的照片





