

本篇介紹手臂的連桿組裝,步驟很簡單,將連桿鎖上馬達時也要考慮是否能左右各轉90度的問題,請看以下步驟:
先準備好這幾塊壓克力

STEP1 固定馬達:將剩餘的二顆馬達用M3*8螺絲分別鎖在J1、J2上,注意J1、J2的字朝上,紅色圈起來的馬達線方向是固定的,這邊注意鎖螺絲的時候不要壓太緊導致壓克力變形。


STEP2 將J1鎖上二顆M3*10螺絲:先不要鎖緊,再將K5用馬達附的白柄與螺絲固定住,注意螺絲頭與白柄要在不同邊,並將K5鎖上馬達,記得轉動一下馬達,看看是否都能左右各轉90度。(圖中K5少一個螺絲洞)

 :
:


STEP3 將N2用馬達附的白柄和螺絲鎖上:鎖好後將N2固定在J2的馬達上,一樣記得左右各轉動90度。


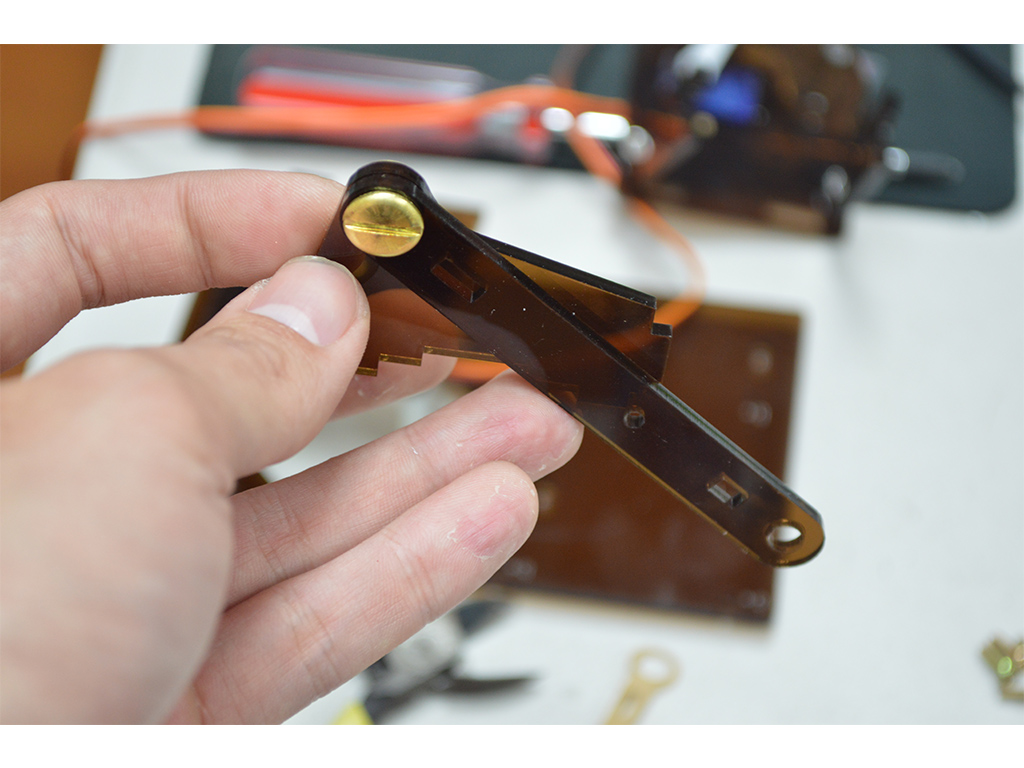
STEP4 將M1、M2以M3螺帽固定在J1上:注意短邊在右、長邊在左,再將L2與K4以3*6帳簿釘固定,帳簿釘鎖的位置是距離螺絲孔較遠的一端,注意一下K4的位置是在L2的內側。

STEP5 固定底座:將上一步驟的J1與K4、L2固定在底座上,另一邊則以J2固定並以二顆M3*10螺絲及螺帽鎖上。

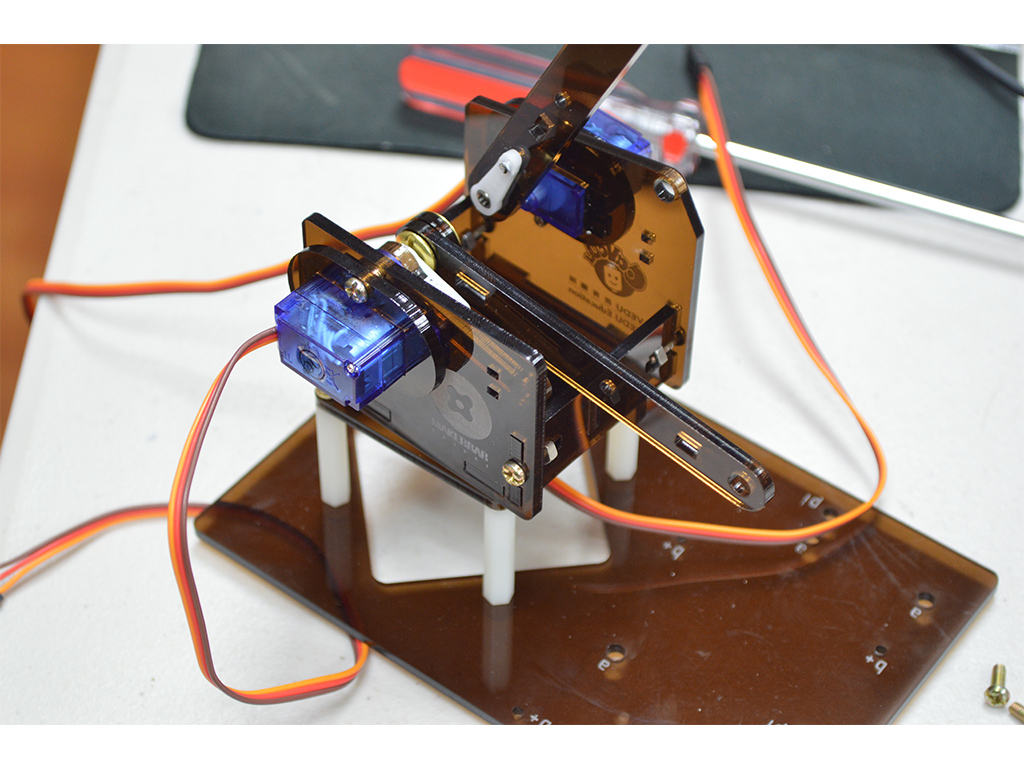
STEP6 手臂後段:將L3以二顆M3*10及螺帽固定,將K2以3*6帳簿釘與N2固定,這邊注意K2的位置是在內側。

STEP7 連桿:將K1與K2、K4以3*6帳簿釘固定,並在J2的外側將K3以3*6帳簿釘固定。

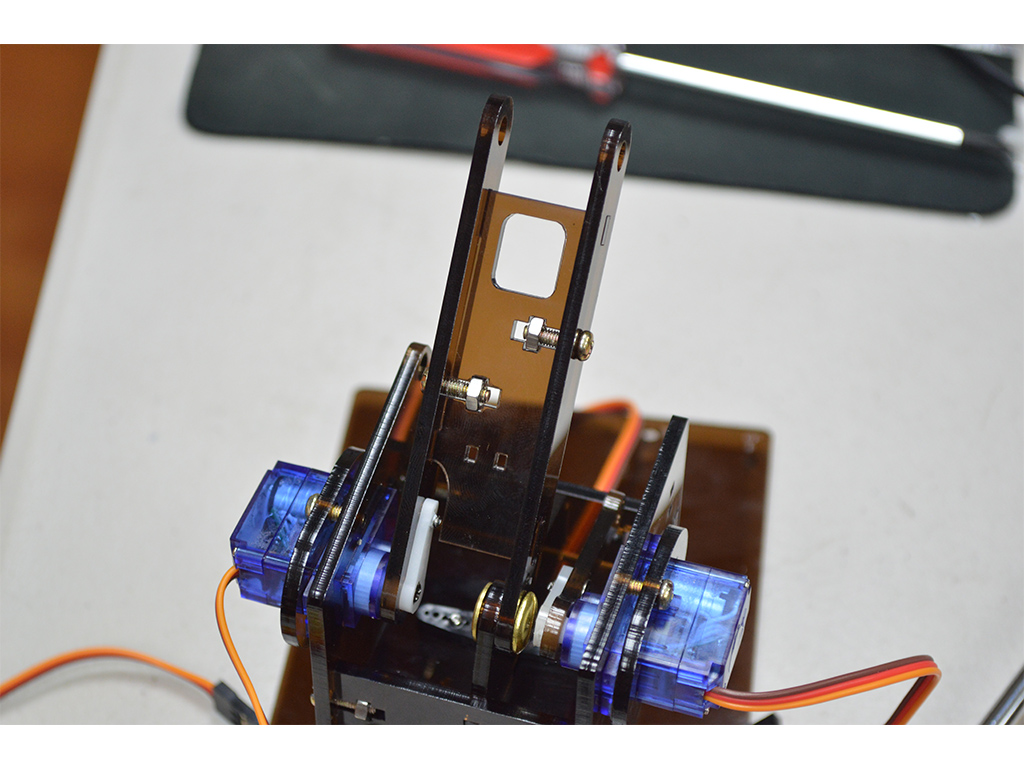
STEP8 左側臂桿固定:按順序將L1、墊片、N1、K3以3*10帳簿釘固定,再按順序將K5、K7、L1、墊片以3*10帳簿釘固定。


STEP9 左前臂上端:將K6與L1以3*6帳簿釘固定。



