

暌違一個多月,簡易四足機器人終於又可以跟大家碰面了!

在ver.0(介紹)之後,我大幅改動設計,製作了ver.1及ver.1.5的機型,卻都落得失敗下場;
幸好依這兩次經驗發展出的作為借鏡,從頭由ver.0調整改良出的ver.2總算能順利運行,今天就來跟大家分享一些製作上的細節及注意事項。
先來看看ver.2有甚麼不一樣的地方吧。
我改以較堅固的2000P厚紙板(2mm後)製作底板,並設計了如下圖的形狀,左端的內縮是為了讓驅動桿及其上的固定件保有旋轉時通過的空間,內削的梯形會比ver.0的「凸」字型更好看耐用,避免應力集中。將馬達至於底板上方,分散負重,並以M3螺絲、螺帽、墊片將馬達、軸座固定於底板。


軸座部分:我認為原先以紙般圍出長方體的設計既不穩固也難製作,因此參考Tamiya多足機器人套件的軸座,用soildworks畫圖後再以公司的閃鑄噴出。底端的固定孔原檔為直徑3mm,輸出後稍稍縮了些,恰好可以讓M3螺絲璇入卡住;但搭配#4雙腳釘(寬度3mm)時,上方的軸孔最好稍微放大,否則會無法順暢旋轉。

連桿部分,我同樣使用1000P(1mm厚)的厚紙板,先在其上繪出工件,並以丸斬搭配鐵鎚、膠墊打孔(下圖左)。
丸斬又名雞眼斬刀,是手工藝常見的打孔工具,有各種直徑。可以在後火車站取得,據觀察有50及150兩種價位(應該是源於產地差異)。
使用時須搭配鐵鎚及膠墊(避免刀口損傷,也可以底部多墊幾層厚紙板)。建議先打孔再裁切,否則當孔洞太靠近邊緣時容易使材料邊翹曲。
下面最右邊的照片便是先裁切再打孔(左)與先裁切再打孔(右)的底板邊緣對照,


打孔完畢後以鋼尺搭配美工刀裁切。先輕劃一刀固定位置裁切輪廓、避免偏移,再安心地重重劃下一刀一刀,快割斷時也可將物件沿刀痕翻開,從背面反割取下。
仔細觀察便會發現,機器人在運行時,前腳(驅動足)的軌跡約為橢圓,可以上下運動帶動機身前進,而後腳(從動足)則為一段弧線,僅協助機身往前。要能達成這樣的軌跡,機器人的前後腳不能太開、也不能太近,大約是使兩足平行時的距離等於驅動軸與後軸孔的距離(如下圖中擺設)。這可以用畢氏定理算出(下圖右),推算出長度後再以接近的長度去製作即可。

桿件同樣以雙腳釘固定彼此,不喜歡突出尖銳的雙腳釘(下圖左)的話,可以在將其彎摺回來,像個小蝴蝶結似的(下圖右),視覺效果還不錯。組裝時請務必確認桿件間彼此平行,否則運行時會出現問題。組裝完畢後,電池座以雙面膠黏貼於底板上。
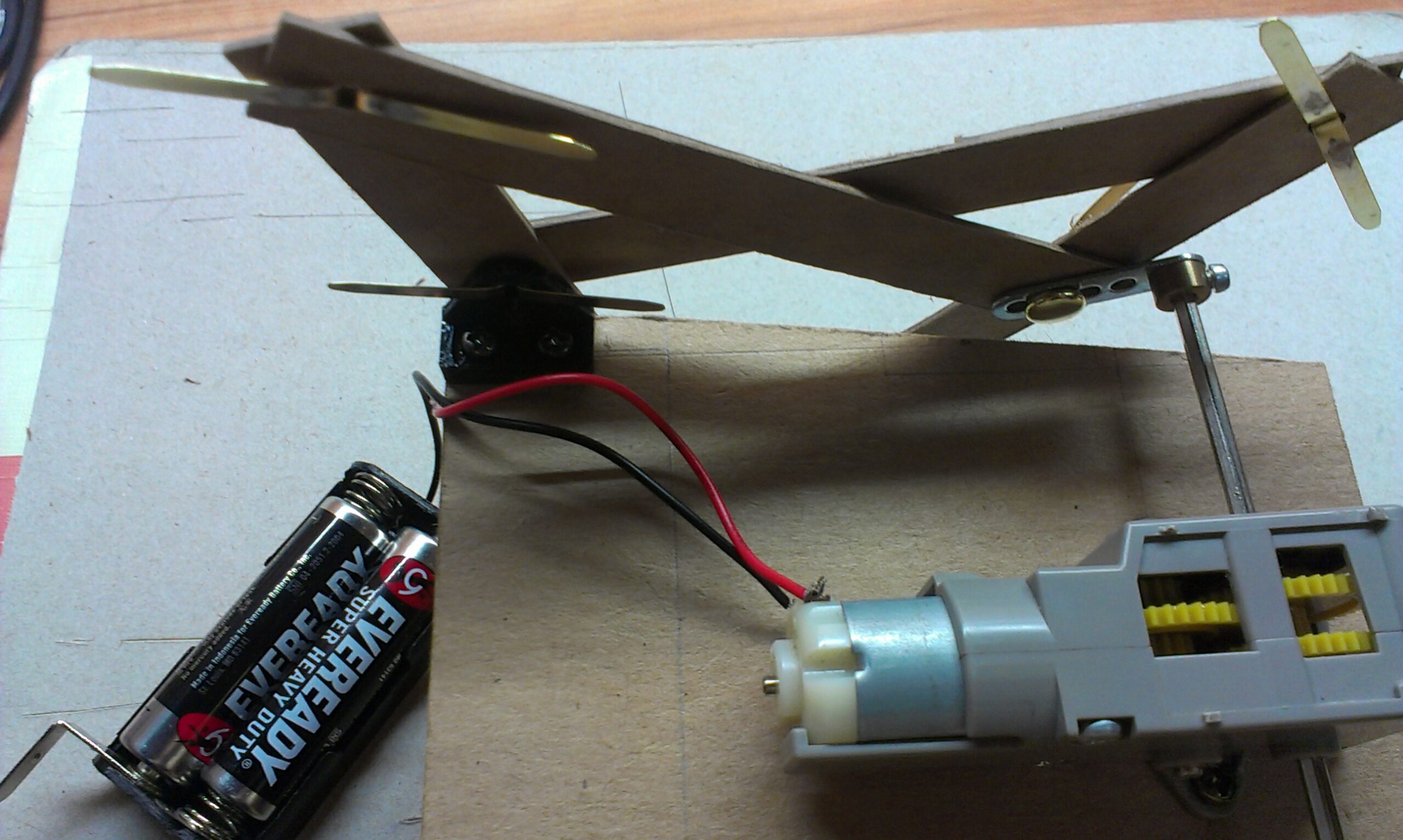

終於完成這隻機器人了,讓我們來欣賞實際運作的影片吧!雖然還是有些小瑕疵,但是不是比ver.0穩定很多呢?
那麼,前兩個版本究竟出了甚麼問題呢?
這是ver.1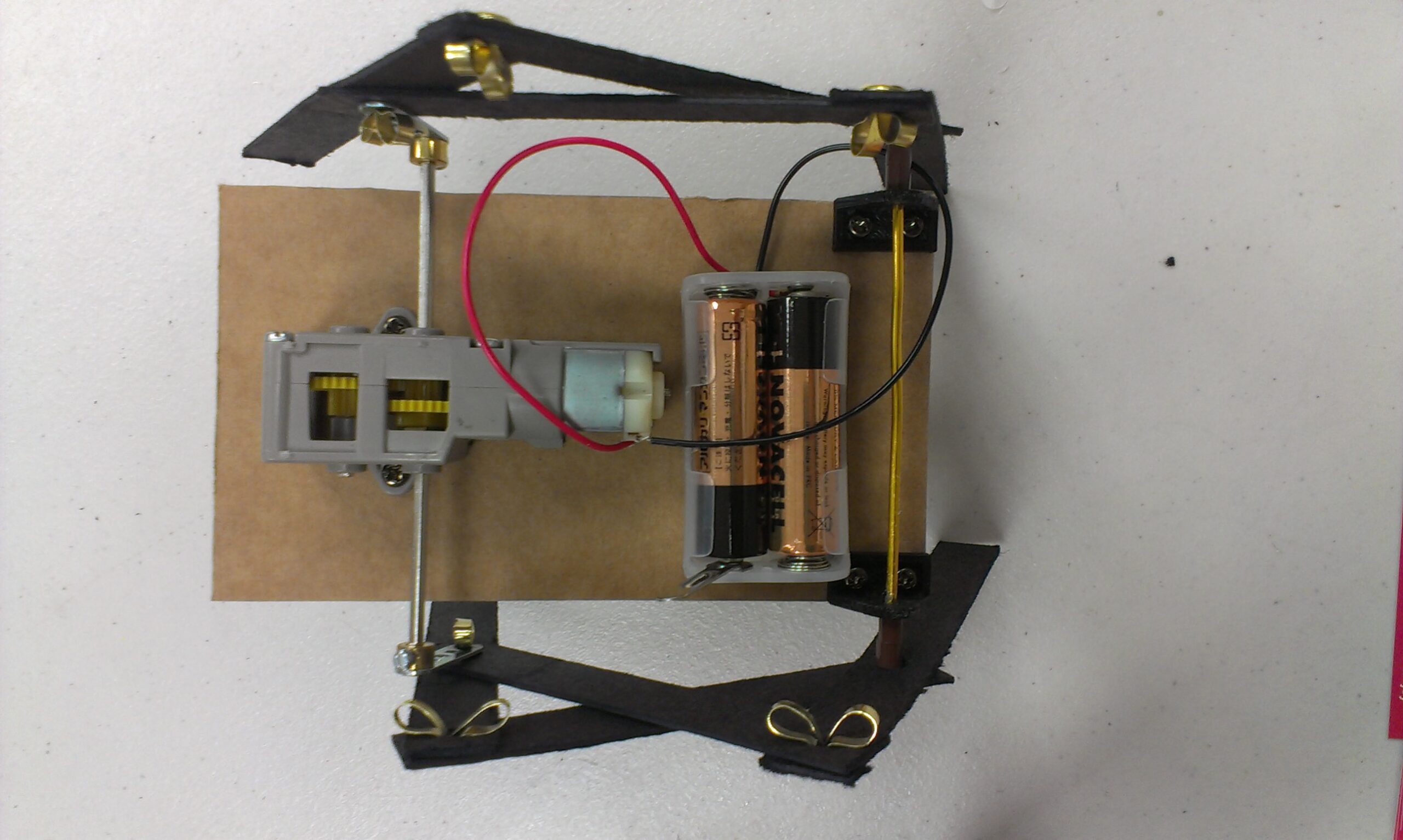 及ver.1.5
及ver.1.5 的照片,
的照片,
因為覺得「凸」字形的底板不好看,我直接裁了個兩邊內縮1cm的長方形。但為了使桿件平行,只好用一根長軸穿過後軸座,加上軸套固定。原以為這麼做會比較穩固,但因為我一時找不到穩定的軸及軸套,想說姑且以鋁線、吸管替代之(這是個天大的錯誤啊!),反而讓桿件更加偏移、歪七扭八的沒轉幾下就垮了。ver.2將底板延伸後直接連接桿件於後軸座,果然穩定許多。
另外,ver.1我將底板拉長,卻忘了同時更改連桿的長度,使它不論驅動桿轉到哪個方向,兩隻腳都是打開的,根本無法畫出前述的軌跡,當然就無法前進囉。
ver.1.5是我第一次嘗試以螺絲、螺帽、墊片固定桿件。由於桿件在運行時會旋轉,某幾個位置會越轉越鬆,雖然可以以保麗龍膠點膠固定,卻會增加日後拆卸改裝的困難。又,這麼多組合件會增加足部重量分散重心,加上一開始用的丸斬直徑過大,螺絲會在孔洞內滑動,增加自由度及連桿的不穩定性,因此在ver.2時又回頭擁抱雙腳釘了。
最後,來個各代機型大合照吧。因為材料有限,所以只要確定機器人無法運轉、材料上可使用,我都會拆下來回收再利用呢。




